


京セラ株式会社(代表取締役社長:谷本 秀夫、以下:京セラ)は、3つのレンズとAIにより、これまでステレオカメラでは測定が困難であった細い線状(細線状)の物体や、金属のような反射する物体などを認識し、その対象物までの距離やサイズを高精度に測定する「3眼AI測距カメラ」を新たに開発しました。製造現場や高度な物体認識を必要とする現場において、人の眼に代わり認識、分類することが可能となるため、労働力不足への対応や生産現場の自動化に貢献します。
また、本開発品は、2026年1月6日(火)~9日(金)(現地時間)に米国ラスベガスで開催される世界最大級のテクノロジー見本市「CES 2026」の当社ブースにて展示いたします。

3眼AI測距カメラ
サイズ:28mm x 30mm x 40mm(W×D×H)
|
■3眼AI測距カメラの特長 <認識可能な物体形状> |
■開発の背景
いまや先進国を中心に多くの国で労働力不足は共通する社会課題であり、それを補うために一層の生産性向上が求められています。その解決策のひとつとして、人間の眼の代わりとなり物体認識ができる高度なビジョン・センシング技術が注目されています。
そこで当社は2024年に、対象物から10cmの距離で測定誤差0.1mmの高精度な距離測定を可能とする「2眼AI測距カメラ」を開発しました。従来のステレオカメラでは認識が困難であった10cmという近距離でのセンシングを可能とし、1mm程度の極小サイズの対象物の距離測定を可能としました。しかし、表面の特長が少ない物体や、対象物の一部が隠れて全体像が認識できない環境下では、2眼カメラでの距離測定が困難な場合もあり、さらなる進化が求められていました。その課題を解決すべく、京セラは「3眼AI測距カメラ」を新たに開発しました。
■3眼AI測距カメラの特長
本カメラは、3つのレンズと独自AIの組み合わせにより、"左-中央"、"中央-右"、"左-右"の3組の視差情報を10cmの近距離から取得します(図1参照)。複数の視差データを組み合わせることで、誤認識を減らし、死角を少なくすることが可能となり、測定の信頼性が大きく向上します。これにより細くて形が不規則な線状の物体(例:ハーネス)や、直径わずか0.3mmの極細ケーブルも正確に距離測定ができます(図2参照)。さらに、2眼では測定困難だった対象物、具体的には、繰り返し模様を持つ対象物や部分的に反射する金属、半透明のプラスチックなど、物体表面にあまり特長がない対象物でも正確に距離を測定できます(図3、4参照)。

※赤矢印:視差情報を取得できる組み合わせ
図1:2眼AI測距カメラ(左)と3眼AI測距カメラ(右)の概略構成図
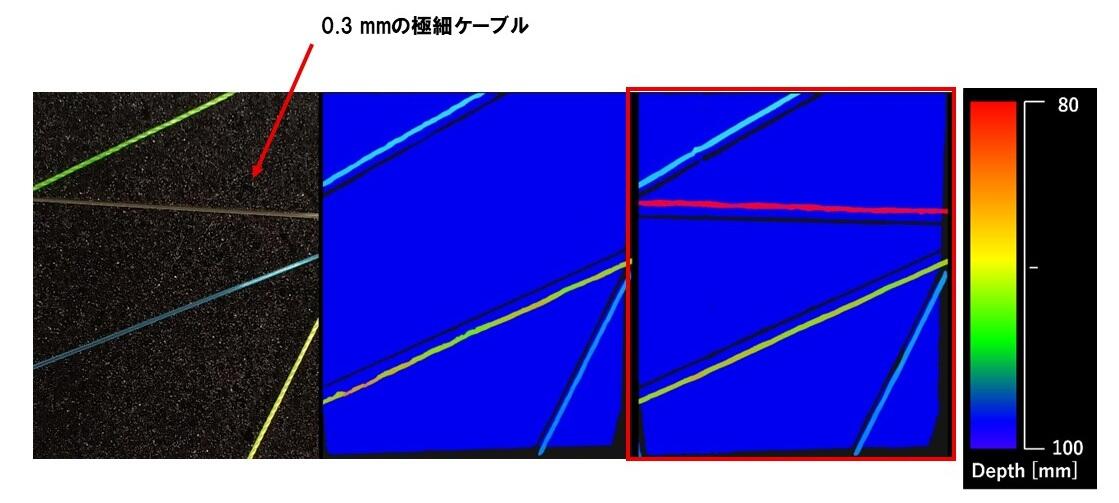
図2:「0.3 mmの極細ケーブル」の測定結果比較
元画像(左)、2眼AI測距カメラ(中)、3眼AI測距カメラ(右)の画像
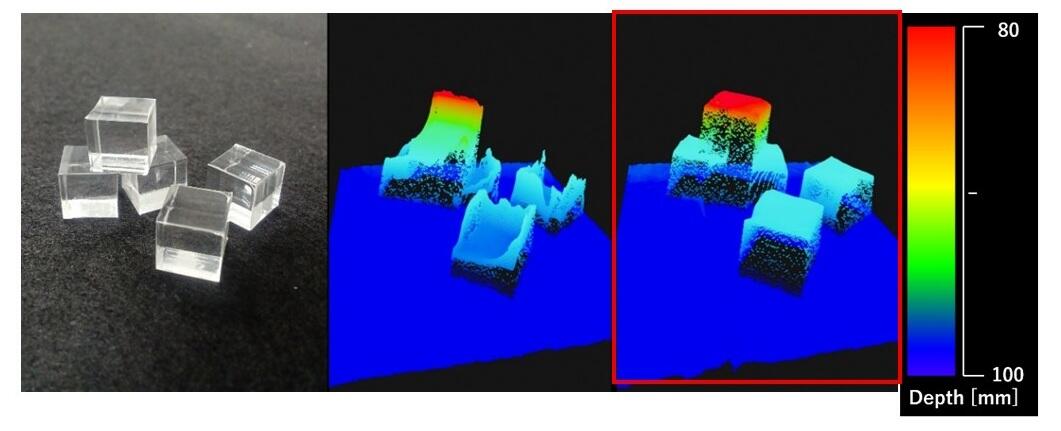
図3:「重なりあった透明キューブ」の測定結果比較
元画像(左)、2眼AI測距カメラ(中)、3眼AI測距カメラ(右)の画像
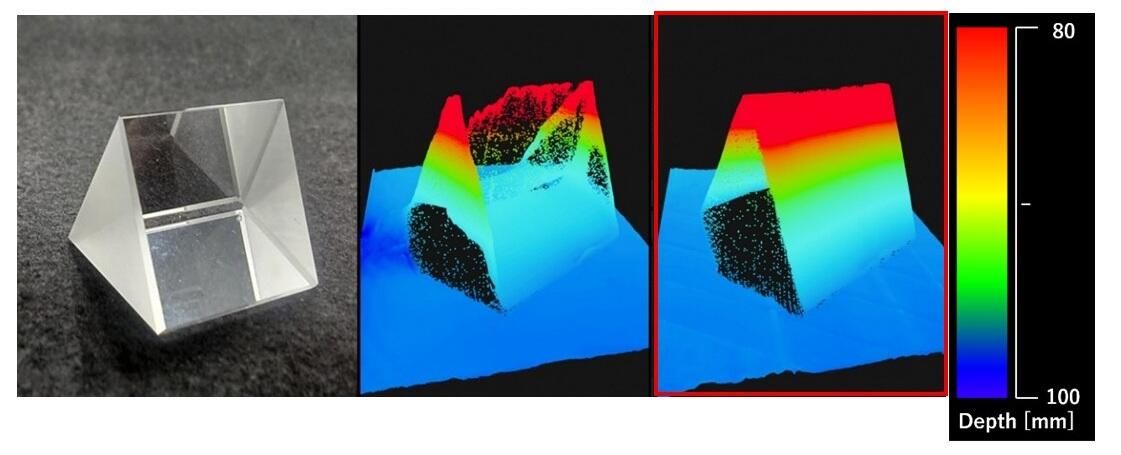
元画像(左)、2眼AI測距カメラ(中)、3眼AI測距カメラ(右)の画像
■今後の展開
これまでの2眼カメラでは測定が難しいとされた対象物の測定を可能とする3眼AI測距カメラは、測定の精度や安定性が向上し、人の眼の代わりとなり高精度な物体認識ができるため、今後さらに多様な産業分野での活用が期待されます。これら3眼レンズ構成のカメラの特性を生かせる応用分野として、以下を視野に入れています。
1.繰り返しパターンの多い検査工程
電子基板や織物など対象物に繰り返しパターンの多い検査工程において、2眼ステレオカメラでは誤認識が発生しやすいですが、3眼のレンズ構成により複数の視差組み合せから物体の奥行や表面の形状を計測することができます。正しい測定ができるため、誤認識を抑制します。
2.手術ロボット
針や糸など細く反射の多い器具は、背景と区別しづらく、部分的に遮蔽が生じやすいですが、3眼レンズ構成なら異なる視点からの情報を統合し、高精度な位置測定が可能です。
3.農業分野の収穫ロボット
果実や葉が互いに遮蔽し合う複雑な環境で、死角の少ない認識と位置測定を可能にします。
京セラはこれまでの研究開発で培った技術を応用し、今後も社会課題の解決に貢献してまいります。






