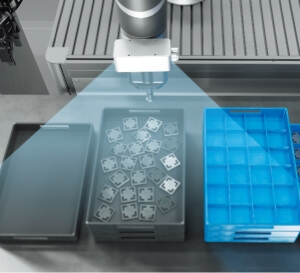
例えば、製造業における「トレーtoトレー整列配膳」工程では、ワークの形状やトレーの仕切り形状に応じて1mm程度の高精度のハンドリングが求められます。
京セラロボティックサービスでは、登録されたワークの形状、プレース側のトレー内の仕切り等をAIが認識することで正確な整列配膳を実行します。段取り替えの際の類似ワークであればロボットが自律的に形状を判定し、新たにワークを登録することなく作業継続が可能です。
協働ロボットの知能化で多品種少量生産におけるピック&プレース作業の省人化・効率化を実現します。
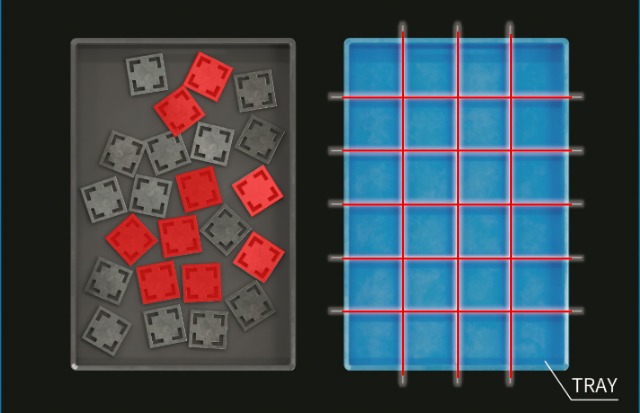
- ワークの中心を高精度(1mm程度)にピック
- トレーの位置を認識
- プレース側トレーの仕切りを認識し整列配膳



